隐马尔科夫模型是一个并不复杂的数学模型,到目前为止,他一直被认为是解决大多数的自然语言处理问题最为快速、有效的方法。它成功地解决了复杂的语音识别、机器翻译等问题。
1.马尔科夫链
马尔科夫过程是俄国数学家A.A.马尔科夫提出的,其原始模型为马尔科夫链。马尔科夫链是指时间和状态都是离散的马尔科夫过程。该过程具有如下特性:在已知系统当前状态的条件下,它未来的演变不依赖于过去的演变。也就是说,一个马尔科夫过程可以表示为系统在状态转移过程,第T+1次结果只受第T次结果的影响,即只与当前状态有关,而与过去状态,即系统的初始状态和此次转移前的所有状态无关。举一个大家熟悉的例子,我们可以把$s_1,s_2,s_3,···,s_t···$看成是北京每天的最高气温,这里面每个状态$s_t$都是随机的。第二,任一状态$s_t$的取值都可能和周围其他的状态相关。回到上面的例子,任何一天的最高气温,与这段时间以前的最高气温是相关的。这样随机过程就有了两个维度的不确定性。马尔科夫为了简化问题,提出了一种简化的假设,即随机过程中各个状态$s_t$的概率分布,只与它的前一个状态$s_{t-1}$有关,即$P(s_t \mid s_1,s_2,s_3···,s_{t-1} )=P(s_t \mid s_{t-1})$。比如,对于天气预报,硬性假设今天的气温只跟昨天有关而与前天无关。当然这种假设未必合适所有应用,但是至少对以前很多不好解决的问题给出了近似解。这个假设后来被命名为马尔科夫假设,而符合这个假设的随机过程则称为马尔科夫过程,也称为马尔科夫链。
2.隐马尔科夫模型
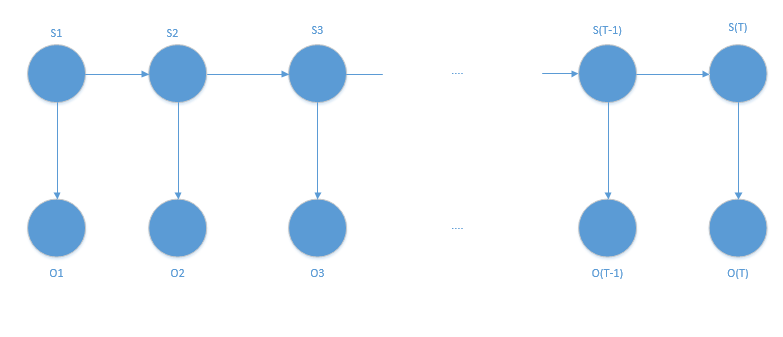
图1所示为隐马尔科夫模型。一个隐马尔科夫模型(HMM)由两组状态集合和三组概率集合构成。
- 隐状态:系统的(真实)状态序列,可以由一个马尔科夫过程进行描述。
- 状态转移矩阵:是隐状态空间,即马尔科夫状态空间的状态转移矩阵。
- 观察状态:在这个过程中显示状态序列。
- Π向量:从一个观察状态到每个隐状态的概率向量(初始概率),表示为初始时刻观察状态转换到隐状态的概率。
- 混淆矩阵:也称为发射概率,包含了每个给定的观察状态转换到每个隐藏状态的概率矩阵。
根据上述描述,可以给出隐马尔科夫模型如下的形式化定义。
一个隐马尔科夫模型是一个五元组($S,O,\pi,A,B$)。
- S:一个系统在t时刻的状态(隐状态)空间几何($S_1,S_2···S_n$)
- O:一个输出(观测状态)状态的集合($O_1,O_2,O_3···O_m$)
- $Π=(Π_i$):初始化概率向量。
- A=($a_{ij}$):状态转移矩阵。
- B=($b_{ij}$):混淆矩阵。
注意,这里t可以不表示事件,在状态转移矩阵及混淆矩阵中的每个概率都可以与时间无关,也就是说,当系统演化时这些矩阵并不一定随时间改变。
HMM中有三个基本问题
- 估计问题:给定一个观察序列$O=O_1O_2···O_T$和模型$μ=(A,B,Π)$,如何快速的计算出给定模型μ情况下,观察序列O的概率,即$P(O\mid μ)$?
- 序列问题:给定一个观察序列$O=O_1O_2···O_T$和模型$μ=(A,B,Π)$,如何快速有效的选择在一定意义下“最优”的状态序列$Q=q_1q_2···q_T$,使得该状态序列“最好地解释”观察序列?
- 训练问题或参数估计问题:给定一个观察序列$O=O_1O_2···O_T$,如何根据最大似然估计来求模型的参数值?即如何调节模型$μ=(A,B,Π)$的参数,使得$P(O \mid μ)$最大?
接下来,举例求解这个模型。因为比较容易懂,很多文献中都用到有关天气的例子。例如,假设我们的一个好朋友在国外,通过电话聊天,我们可以了解朋友所在城市的生活状态,比如晴天的时候,朋友会出去跑步,阴天的时候会窝在家里睡觉,下雨天的时候会喜欢看书,或者听音乐。这样我们可以从朋友的状态推测出朋友所在城市的天气情况。假设我们还知道一年中晴天,阴天和雨天的总比例,也就是初始向量,还知道每种天气间的转移概率,以及朋友做每件事对应天气的发射概率。具体模型如图2所示。
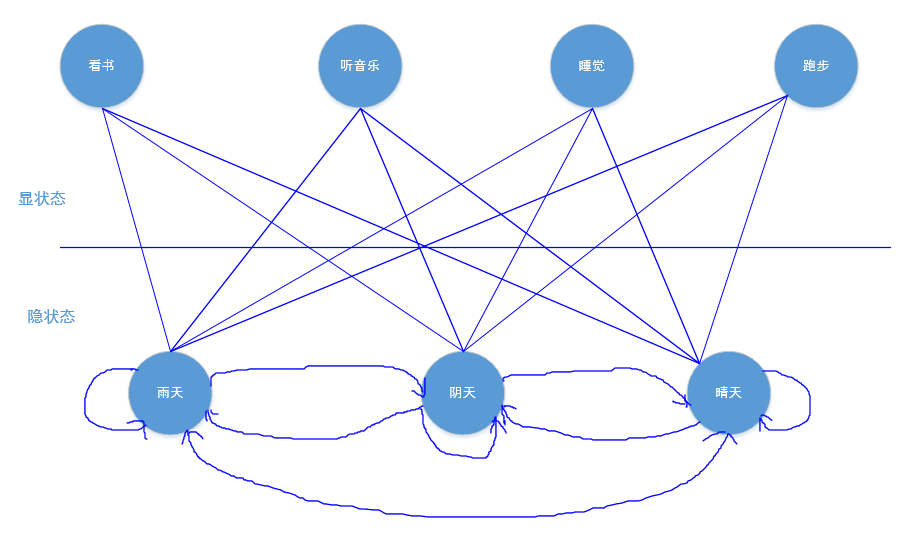
由图2可知:
-
S是天气系统在t时刻的状态空间集合:{晴天,阴天,雨天}。
-
O是一个输出状态的集合:{看书,听音乐,睡觉,跑步}。
-
初始化概率向量Π:{0.63,0.17,0.20},表示一年中晴天、阴天、雨天的概率。
-
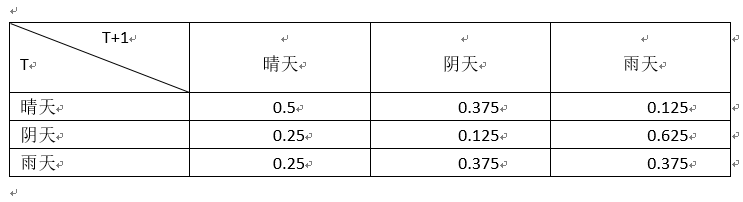
状态转移矩阵A(见表1)。
-
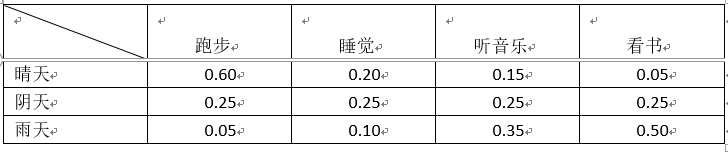
混淆矩阵B(发射概率),如表2所示。
假设朋友连续三天的显状态为(跑步,睡觉,看书),然后你想预测这三天的天气状态:隐状态序列。
那么很自然,天气预测就转换为如图3所示的形式。
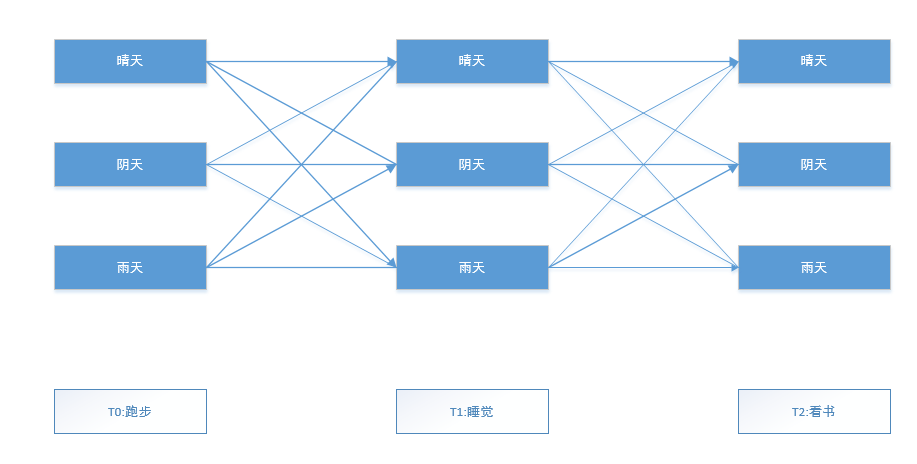
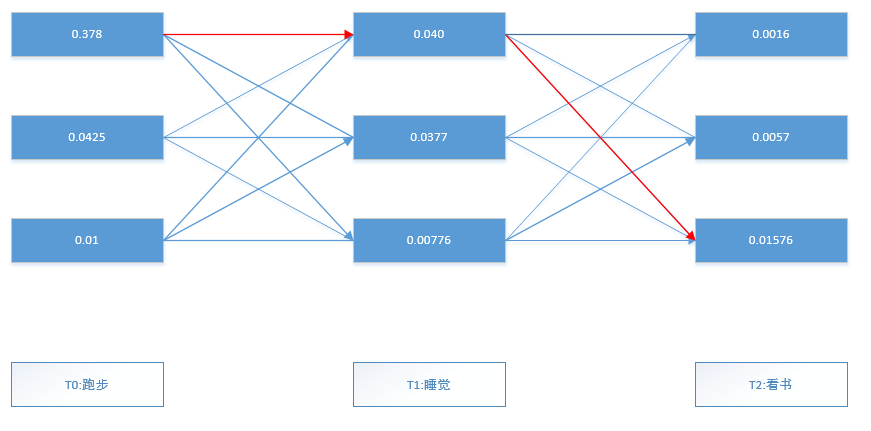
根据马尔科夫链的规则,预测这三天的天气状况,实际上就是计算$T_0$~$T_2$三天中所有路径中最大的一条,但现在多了一个显状态,以及该显状态对应隐状态的发射概率。前向算法的求解过程如下。
-
给出这三天的显状态序列:(跑步,睡觉,看书)。为了泛化计算,也给出一般化的形式:($b_{k1},b_{k2}···b_{kr}$)。
-
首先计算最初的状态。这一步最简单,初始状态为Π。初始$t_0$的显状态为跑步,则
$a_1(晴天)=0.63×0.6=0.378$ $a_1(阴天)=0.17×0.25=0.0425$ $a_1(雨天)=0.20×0.05=0.01$ 其中,$b_{jkl}$是混淆矩阵,也称发射概率,j代表天气状态序列,k表示朋友的生活状态(观察序列);Π为初始化概率向量,其初始值为(0.63,0.17,0.20),得到的$a_1(j)$是第一天的转移概率。
然后计算最大概率的那个天气状态:$argmax(α(j))$。很显然最大概率的天气状态为$α_1(晴天)$,最大的概率为0.378.
-
接下来计算第二题的状态转移概率,因为后一天状态由前一天来决定(马尔科夫性),同时第二天的转移概率也受第二天的显状态影响。与第一天相似,使用已经得到的$a_1(j)$,以及显状态睡觉的发生概率,$a_2(j)$的计算过程如下。
$a_2(晴天)=(0.378×0.5+0.0425×0.25+0.01×0.25)×0.2=0.04025$ $a_2(阴天)=(0.378×0.375+0.0425×0.125+0.01×0.0375)×0.25=0.037703125$ $a_2(雨天)=(0.378×0.125+0.0425×0.625+0.01×0.0375)×0.1=0.00775625$ 形式化上述的运算如下:$α_{t+1}(j)=b_{jkt+1}\sum_{i=1}^n α_t(j)α_{ij}$
其中,$b_{jkt+1}$是t+1时刻的混淆矩阵,也称为发射概率,j代表天气状态序列,k代表朋友的生活状态(观察状态)序列;得到的$a_t(j)$是当时时间的状态转移概率,那么t+1指的是下一时刻,$a_{ij}$是隐状态的转移概率。
同样,计算最大概率的那个天气状态:$argmax(α_{t+1}(j))$.同样,最大概率的天气状态为$a_2(晴天)$,最大的概率为0.04025。
-
最后,计算第三题的状态转移概率。同样,最后一天的状态由前一天来决定,同时最后一天的转移概率也受前一天的显状态影响。与第二天的计算公式相同,使用已经得到的$a_2(j)$,以及显状态看书的发生概率,$a_3(j)$的计算过程如下:
$a_3(晴天)=(0.040425×0.5+0.037703125×0.25+0.00775625×0.25)×0.05=0.0015788671875$ $a_3(阴天)=(0.040425×0.375+0.037703125×0.125+0.00775625×0.375)×0.25=0.00569521484375$ $a_3(雨天)=(0.040425×0.125+0.037703125×0.625+0.00775625×0.375)×0.5=0.0157630859375$ 运算公式与(3)相同:$α_{t+1}(j)=b_{jkt+1}\sum_{i=1}^n α_t(j)α_{ij}$和$argmax(α_{t+1}(j))$。同样,最大概率的天气状态为$s_3(雨天)$,最大概率为0.0157630859375。
-
根据输出概率得到每天的最大概率值。得到最终的推理结果为晴天→晴天→雨天。
-
python算法代码如下:
#-*- coding:utf-8 -*-
from numpy import *
startP=mat([0.63,0.17,0.20]) #起始概率
stateP=mat([[0.5,0.25,0.25],[0.375,0.125,0.375],[0.125,0.675,0.375]])
#状态转移概率
emitP=mat([[0.6,0.20,0.05],[0.25,0.25,0.25],[0.05,0.10,0.501]])#发射(混合)概率
state1Emit=multiply(startP,emitP[:,0].T)
print (state1Emit)
print ("argmax:",state1Emit.argmax())
#计算干燥的概率
state2Emit=stateP*state1Emit.T
state2Emit=multiply(state2Emit,emitP[:,1])
print(state2Emit)
print("argmax:",state2Emit.argmax())
#计算潮湿的概率
state3Emit=stateP*state2Emit
state3Emit=multiply(state3Emit,emitP[:,2])
print(state2Emit)
print("argmax:",state3Emit.argmax())
结果输出如下:
[[ 0.378 0.0425 0.01 ]]
argmax: 0
[[ 0.040425 ]
[ 0.03770312]
[ 0.00796875]]
argmax: 0
[[ 0.040425 ]
[ 0.03770312]
[ 0.00796875]]
argmax: 2
显然,随着矩阵的规模增大,算法的计算量是灾难性的。下面思考简化计算过程。
4.Viterbi算法的实现
维特比算法用于求解HMM中第二个问题,给定一个观察序列$O=O_1O_2···O_T$和模型$μ=(A,B,Π)$,如何快速有效的选择在一定意义下“最优”的状态序列$Q=q_1q_2···q_T$,使得该状态序列“最好地解释”观察序列?这个问题的答案并不是唯一的,因为它取决于对“最优状态序列”的理解。一种理解是,是该状态序列中每一个状态都单独的具有最大概率,即要使得 \(γ_t(i)=P(q_t=s_i\mid O,μ)最大\)
根据这种对“最优状态序列”的理解,如果只考虑每个状态的出现都单独的达到最大概率,而忽略了状态序列中两个状态之间的关系,很可能导致两个状态$q_t$和$q_{t+1}$之间的转移概率为0.即$q_tq_{t+1}=0$。那么,在这种情况下,所谓的“最优状态序列”根本就不是合法的序列。因此,我们常常采用另一种对“最优状态序列”的理解:在给定模型μ和观察序列O的条件下,使条件概率$P(Q \mid O,μ)$最大的状态序列,即 \(Q=argmaxP(Q \mid O,μ)\) 这种理解避免了前一种理解所引起的“断序”的问题。根据这种理解,优化的不是状态序列中的单个序列,而是整个状态序列,不合法的状态序列的概率为0,因此,不可能被选为最优状态序列。
维特比算法运用动态规划的搜索算法求解这种最优状态序列。为了实现这种搜索,首先定义一个维特比变量$δ_t(i)$.
维特比变量$δ_t(i)$是在时间t时,HMM沿着某一条路经到达状态$s_i$,并输出观察序列$O=O_1O_2···O_t$的最大概率。
为了记录在t时间时,HMM通过哪一条概率最大的路径到达状态$s_i$,维特比算法设置了另外一个变量$ψ_t(i)$用于路径记忆,让$ψ_t(i)$记录该路径上状态$s_i$的前一个(在时间t-1)状态。
-
最初状态的计算与前面相同。
$a_1(晴天)=0.63×0.6=0.378$ $a_1(阴天)=0.17×0.25=0.0425$ $a_1(雨天)=0.20×0.05=0.01$ 然后计算最大概率的那个天气状态:$arg max(δ(i,t))$.
计算结果为δ(晴天,1)概率为0.378.
-
接下来计算第二天的状态转移概率:$δ_t(i)=max(δ_{t-1}(j)α_{ji}b_{ikt})$。
$a_2(晴天)=max(0.378×0.5,0.0425×0.25,0.01×0.25)×0.2=0.0378$ $a_2(阴天)=max(0.378×0.375,0.0425×0.125,0.01×0.0375)×0.25=0.0354375$ $a_2(雨天)=max(0.378×0.125,0.0425×0.625,0.01×0.0375)×0.1=0.004725$ 同样,计算最大概率的那个天气状态:$arg max(δ(i,t))$.
计算结果为δ(晴天,2)概率为0.0378.
-
最后计算第三天的状态转移概率。
$a_3(晴天)=max(0.0378×0.5,0.0354375×0.25,0.004725×0.25)×0.05=0.00945$ $a_3(阴天)=max(0.0378×0.375,0.0354375×0.125,0.00472×0.375)×0.25=0.00354375$ $a_3(雨天)=max(0.0378×0.125,0.0354375×0.625,0.00472×0.375)×0.5=0.01107421875$ 最后,计算最大概率的那个天气状态:$arg max(δ(i,t))$,δ(晴天,3)概率为0.01107421875.
根据最后一天的最大概率δ(晴天,3)概率为0.01107421875,我们逆向推出到达该状态最大概率的路径:晴天→阴天→雨天。
5.小结
隐马尔科夫模型最初应用于通信领域,继而推广到语音和语言处理中,成为连接自然语言处理和通信的桥梁。同时,隐马尔科夫模型也是机器学习的主要工具之一。